<<E2BOT自走車的一系列教材>>
這是e2bot的作業,熟析超音波及馬達的特性。
使用超音波來決定車輛的行駛,出作業之前已和學生教授過超音波測距的數值變化。
作業說明:
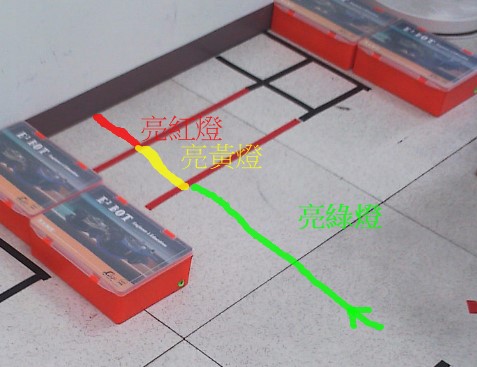
1. 車子由箭頭處起點前進,在進入第一條線前RGB燈亮綠燈,進入第二條線前亮黃燈,進入第二條線後亮紅燈,每條線間隔15公分。
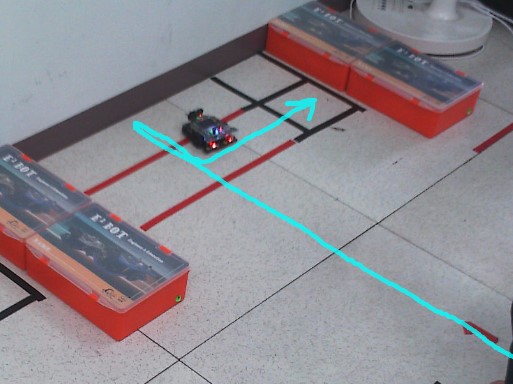
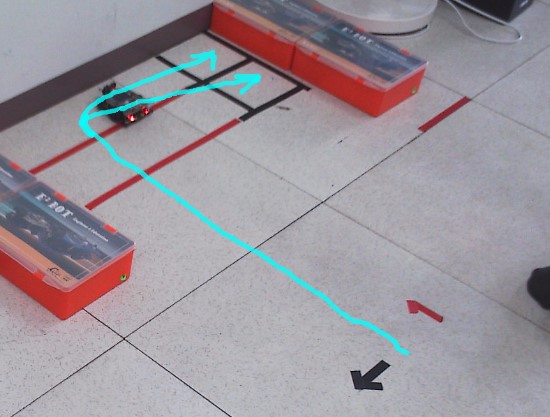
2. 到底後需要右轉停車,方式不限,例如以下方式都可以:
3. 車子不可以撞牆,撞一次扣1分。
4. 車子4個接點(2個輪子和2個導珠子)都得完全停到格子內,不能碰到黑線。
5. 評分標準
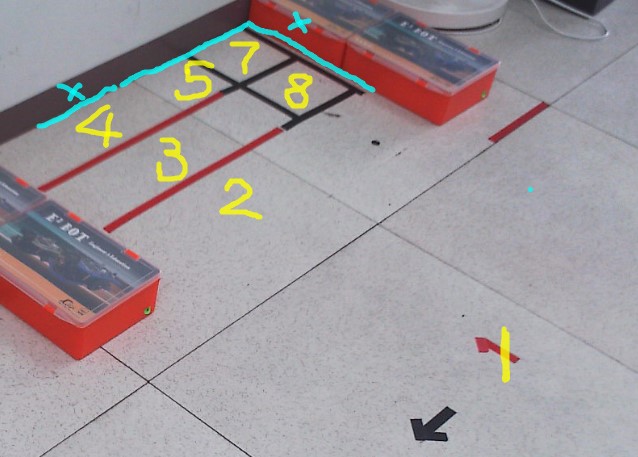
按下彈片能啟動得1分,能右轉但無法進到格內得5分,進入格內後壓線得6分,撞牆一次扣1分,無法正確顯示燈號扣1分,最高得8分。
學習重點
超音波及馬達,需要約1~1.5個小時
步驟
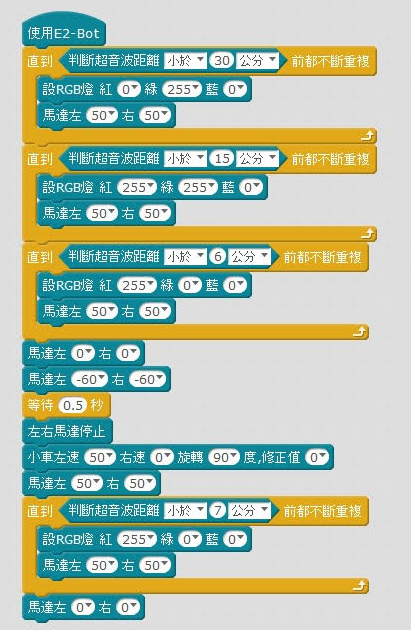
參考程式
執行結果及檢測
要自行計算馬達的轉速和距離,並輸入修正值。
全班31位同學第一次測試的得分統計如下:
(最高分)
8分 -- 9人
7分 -- 1人
6分 -- 14人
5分 -- 3人
4分 -- 1人
3分 -- 3人
大部分的同學得到6分,主要問題都是車子沒辦法準確停到格子中,壓到了黑線。
所有同學都選擇停8分的停車格,只有2位同學選擇停7分的停車格,其中一位因為壓到線只能得6分。
討論
評分方式應該再修正,因為這樣大家都集中得到6分,無法分出區別,鑑別度不足。
有些同學會用算秒數的方式完成任務(例如前進幾秒亮黃燈),只要改變起始位置就能知道,評分時老師可隨機指定數個起始位置。
兩個停車格因為分數不同,所以同學都選擇右邊車格(高分的)嘗試,所以我的給分標準應該要修正。
學生自己完成任務會有成就感。