mbot基本配備的是直流馬達,分別在左側(M1)右側(M2)。以電壓大小控制馬達轉速,並透過改變電流正負方向,控制馬達順時鐘或逆時鐘轉動。(另外還有歨進馬達與伺服馬達)
控制馬達的積木有二種。
第一種 雙馬達控制
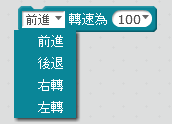
可以設定二個馬達同時運轉,前進、後退、左轉、右轉 (請觀察~在此功能積木下左右轉時二側馬達的運轉情形?)
參數控制:-255~255 (0代表停止,負數代表反方向,數值越大,轉速越快。) 注意:如果前進後退相反,就是馬達的連接埠接反,對調後就OK。
停止前進(或是停止後退左右轉):
第二種 單馬達控制
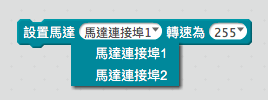 可以分別設定左側(M1)與右側(M2)馬達的轉速。
可以分別設定左側(M1)與右側(M2)馬達的轉速。
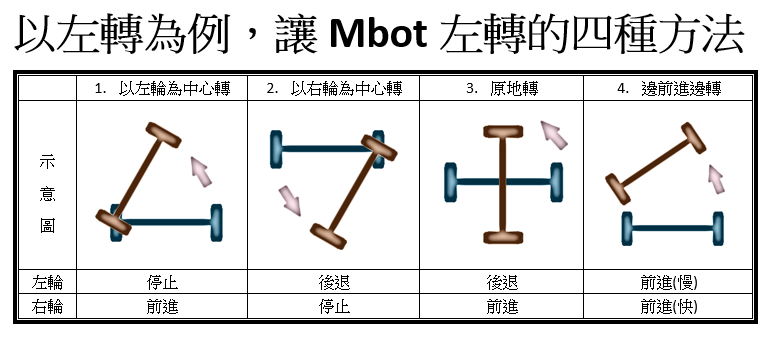
利用不同轉速,控制機器人動作,特別是左右轉。
前進後退時,二個馬達轉速相同。
如果右側(M2)馬達的轉速>左側(M1)馬達轉速,就會左轉。
如果右側(M2)馬達的轉速<左側(M1)馬達轉速,就會右轉。
如果右側(M2)馬達的轉速=左側(M1)馬達轉速,但是一正一負,則會原地打轉。
這組馬達積木通常會搭配循線感測器偵測使用,或是進行較精確的轉彎動作。
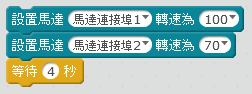
基本前進測試
讓學生操作等待秒數與前進轉速,並記錄移動距離。注意: ,指的是讓動作持續一秒。如果沒有這個指令積木,將會持續動作。
,指的是讓動作持續一秒。如果沒有這個指令積木,將會持續動作。
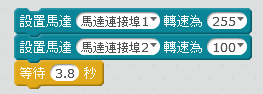
 固定轉速,比較持續時間與移動距離的關係。
固定轉速,比較持續時間與移動距離的關係。
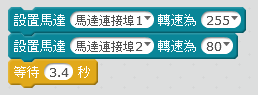
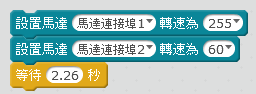
 固定秒數,比較轉速與移動距離的關係。
固定秒數,比較轉速與移動距離的關係。
一般來說,移動距離是由輪子大小決定。輪子直徑6.5cm,圓周長接近20cm,移動距離=20 * 轉動圈數 (一般來說,以速度100移動50公分大約需要3.5秒)
比較感興趣的是轉彎。scratch的積木可以控制角色轉動角度,但在mbot機器人模組,我們使用的直流馬達沒有辦法直接控制角度,因此得藉由轉速與等待時間去調整。以左轉為例,使用第一種積木時,轉速與等待時間要如何搭配才能讓mbot轉90度?使用第二種積木又要怎麼搭配才能左轉90度?
 書上給的轉彎90度參考值,0.65~0.7秒。
書上給的轉彎90度參考值,0.65~0.7秒。
另外,馬達在靜止啟動時,若轉速太小(例如50)則不容易動起來,可以高速啟動後再降低速度。
基本轉彎練習
讓機器人車子走正方形、十字型或8字型(很難耶~ 循線走比較容易)。因為要離線測試,所以這裡多加一個等待積木~等待板載按鈕已按下。
會讓學生先從正方形開始...(還可穿插蜂鳴器與LED,在轉彎時作為警示)
 這樣的設定可以右轉90度,讓mbot走正方形嗎?請學生調整參數。
這樣的設定可以右轉90度,讓mbot走正方形嗎?請學生調整參數。
 正方形,若以轉彎轉速100持續0.65,則能接近直角轉彎。
正方形,若以轉彎轉速100持續0.65,則能接近直角轉彎。
 這樣也可以轉四分之一圈(弧形轉彎)
這樣也可以轉四分之一圈(弧形轉彎)
8字轉彎:
 直徑30公分一圈
直徑30公分一圈
 直徑20公分一圈
直徑20公分一圈
 直徑10公分一圈
直徑10公分一圈
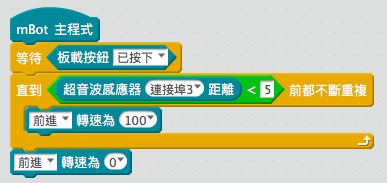
配合超音波感應器
目前我只教到超音波感測器( [mbot] 超音波感測器(1/2) 幾個無馬達的簡單應用:超音波琴、計數器@精讚 ),所以這裡就以超音波為例。簡單煞車練習如下:
 或
或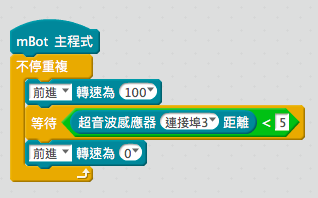
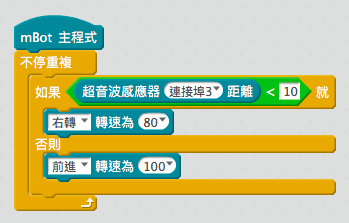
配合超音波感應器進行簡單的避障轉彎。
避障練習(先退後再轉彎)
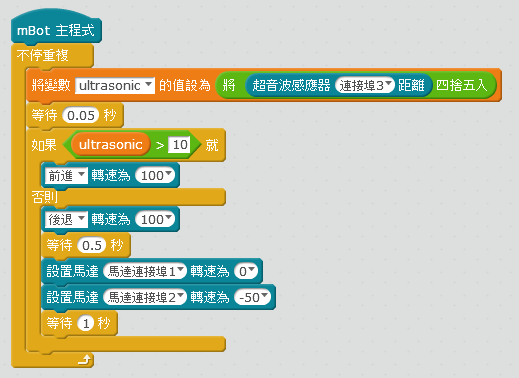 中間多了緩衝的0.05秒(或0.01秒),讓機器人大腦不會混亂。
中間多了緩衝的0.05秒(或0.01秒),讓機器人大腦不會混亂。
或是將超音波回傳數值作為車子前進轉速的依據。
馬達要搭配其他感測器做移動比較有趣,並加上對應的聲光效果。或利用隨機挑選轉速,讓機器人亂跳舞也不錯。
對了~馬達要離線操作比較好玩! 前面可以加一個控制積木 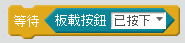
其他關於超音波與馬達,請見另一篇: [mbot] 超音波感測器(2/2) 結合馬達的簡單應用@精讚 。