這學期課程來到了mbot,這是我第二次教mbot,這篇是2018我的mbot教學記錄,有點經驗後,也對課程安排做了調整。
輸出裝置: :LED、蜂鳴器、馬達
感測或輸入裝置:光感應、超音波、紅外線、按鈕、遙控器
前一年的教學(一學期課程):[mbot] 我的mbot 教學記錄(2017~) @zfangの科學小玩意
第1-2週 基礎介紹 (2018.02.22~03.01)
第一堂 基礎介紹、安裝軟體、影片補充( [mbot] 進入mbot課程前後可以看看的幾段小影片@精讚 )。
第二堂 認識mbot、車況檢查、拆解輪胎讓學生檢查馬達螺絲是否鎖緊,連接與狀況排除練習。 [mbot] mbot連線概念整理@精讚
(這堂課花很多時間讓學生練習簡單維修與排除連線問題,根據之前經驗,訓練好之後~學生就能交互檢查排除問題與測試,重複幾個檢查步驟,就不用每一節課都要讓我個別排除惱人的麻煩~ 學生若是會處理,我就可以輕鬆些。)
第3週 離線自走練習&認識輸出裝置:馬達 (2018.03.07-08)
第一堂 這學期決定從馬達開始介紹,先練習走正方形。以地板上的格子當做走正方形的依據,讓學生測試與修正秒數轉數。複習之前的連線與馬達螺絲帽檢查,進入離線自走。配合離線自走,在主程式下方多加一個等待積木~等待板載按鈕已按下。
本堂練習: "如何讓車子做直角轉彎?",完成讓"離線讓車子走正方形"
第二堂 設定三個挑戰關卡,再講馬達個別的控制積木,讓學生知道如何微調個別輪胎轉速讓車子順利走直線、如何讓車子右轉,並試著讓車子走出一個比地板方格還大的圓形。圓形其實不難,控制轉速差就能。學生若是只用現成的右轉積木,就會原地打轉。以程式來說,比走正方形容易。讓學生們自己試,他們很認真的測試與計算,需要幾秒才能走多遠、轉多少度。
第一關 走出正方形(貼著地板格子的黑線)
第二關 走一個大圈,要繞地板方格的外圍
第三關 直線前進,倒車入庫(我一直想做這個)學生大多完成第一、二關,只有一位男生完成到第三關。
(參考這篇的前半段 [mbot] mbot的直流馬達介紹@zfangの科學小玩意)
第4週 認識光線感應器(光敏電阻) (2018.03.14-015)
本周由同事代課,教授光敏電阻,並搭配舞台動畫,讓學生利用光敏的偵測值來切換白天晚上。並進行小遊戲製作。
第5週 馬達II (2018.03.22-03.23)
第一堂 延續上一堂光敏電阻,讓學生完成光感動畫。連線與測試mbot的感測功能、上傳失敗,依然是每節課一開始的挑戰,希望以後這樣的時間可以再縮短。
第二堂 已完成動畫者,持續進行馬達闖關。馬達闖關很有趣,對學生來說是個挑戰,特別是停車任務。才隔一周,就有學生忘記怎麼走正方形了。
第一關 走出正方形(貼著地板格子的黑線)
第二關 走一個大圈,要剛好繞地板方格的外圍(像是圓內接正方形的概念,調整轉速從正方形的一角出發)
第三關 直線前進,倒車入庫(這個很簡單)
第四關 直線前進,路邊停車(就...很有挑戰了)有一個男生過了第四關,但是~逆向停車。唯一成功的女生,雖然真實世界裡不會有人如此繞圈圈停車,但以mbot來說,她停得很漂亮!過關。

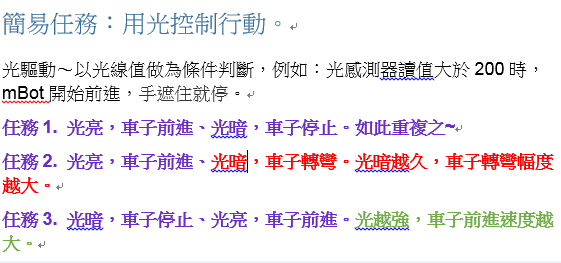
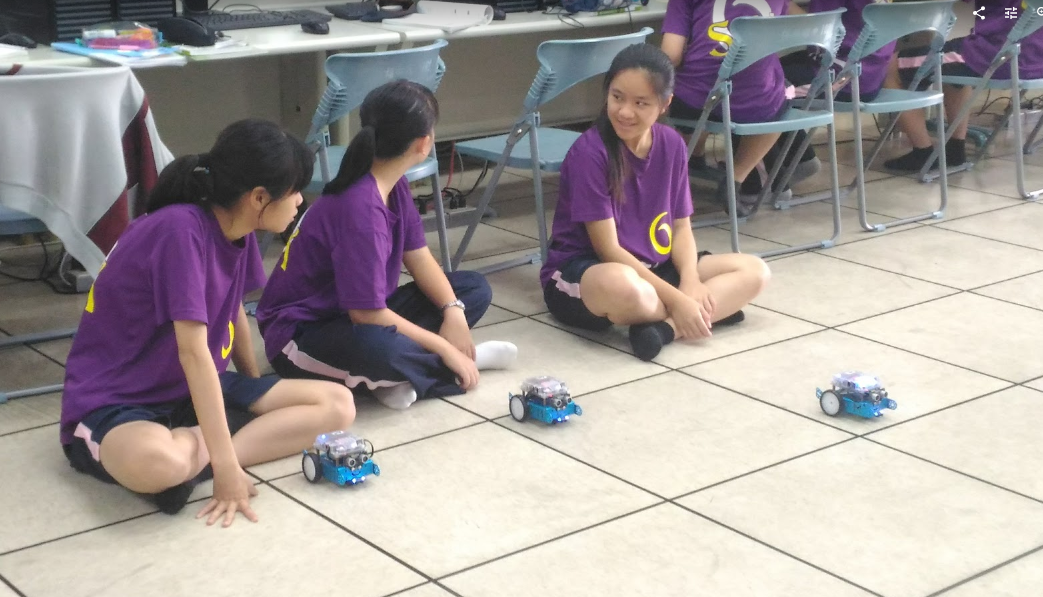
第6週 光感與馬達互動 (2018.03.28-03.29)
利用光線控制車子的動作(之前我是在超音波時才做)。107因段考暫停。
第三關讓學生走紙箱隧道,進入紙箱(前端先蓋住)因光線減弱而慢慢停下,完全停住之後,再將紙箱蓋慢慢打開,然後...車子就走出來了~ 這個還滿有趣的。
第7.8週 LED蜂鳴器與紅外線發射與接收 (2018.04.11)
第7周清明連假停課。這周教LED與蜂鳴器,並想讓學生進行小組創作,所以又加了紅外線的發送消息與接收。
第一堂 LED與蜂鳴器,讓左右的LED輪流發出紅橙黃綠藍靛紫,並且要注意一邊的燈在亮的時候,一邊的燈要按。
第二堂 交代學生小組創作任務:「只有第一台車是以按鈕啟動,其他二台車須以紅外線呼叫接收訊息方式聯繫,每台車須有音樂或燈光大配動作,先一台一台獨自表演,最後要三台同時表演。」任務還不太明確,我以為很簡單,頂多就是在動作之前或之後再多加個發送消息與等待接受的指令。(後來才知道,發送消息可以重複多次,以免紅外線沒偵測到。)


第9週 三人小組共同創作 (2018.04.18)
第一堂 學生持續進行三人小組發送消息與接收消息。並分組完成驗收。如果發送消息的積木裡不小心加上引號,會造成程式無法上傳。透過分組活動,學生解決程式無法上傳連接失敗與mbot的回復原廠設定問題。
第二堂 陸續驗收成果,練習時,只要成功,就會驚呼。不只是自創動作,還要能夠完成溝通。106重視呼叫,107的動作比較多變化。學生們相互討論,感覺真不錯。會討論轉速與秒速,以便彼此的動作相互配合。認真的時間過得特別快,"我們來試!"學生們討論與練習的畫面,真棒。


第10週 循線感應器1~經過三條黑線就停車 (2018.04.25)
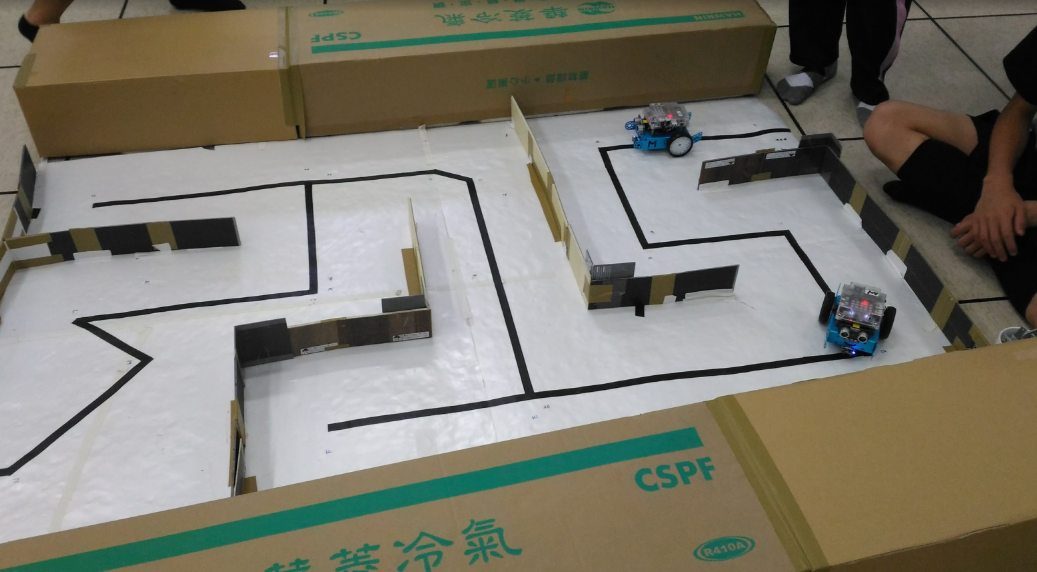
只剩二個感應器,循線感應器與超音波感應器。上學期是先上超音波,這學期調整順序也不錯。等上完循黑線,再教循白線,並操作團隊遊戲。之後教超音波,繞障與循線接力。對了~漂亮的迷宮我還沒有讓學生挑戰,之後,他們可以決定用循線還是超音波,或是一起組合來過關。
第一堂 終於進到循線感應器。不過,107的同學希望再多一節課做共同創作,所以就讓他們做了。(好的小組任務能激發同學討論,我喜歡紅外線發射與呼叫。) 106是同事幫忙代課,就進入循線了。
做的很棒~看到同學展示成果,大家圍觀與拍手。
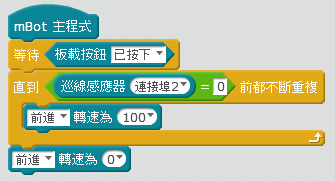
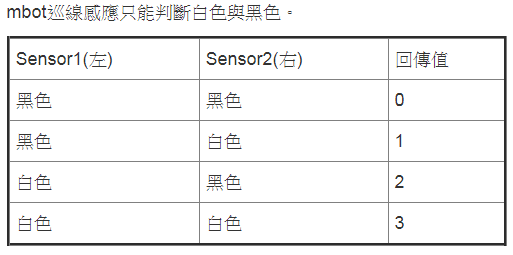
第二堂 先學0123,再練習遇到黑線就停車,任務:經過三條黑線就停車,要搭配變數。 (107) 106可以上到走8字。
自我檢查,讓學生知道0123的意思。
另外也再複習這三種,走判斷就不用算秒數:
數三條黑線:


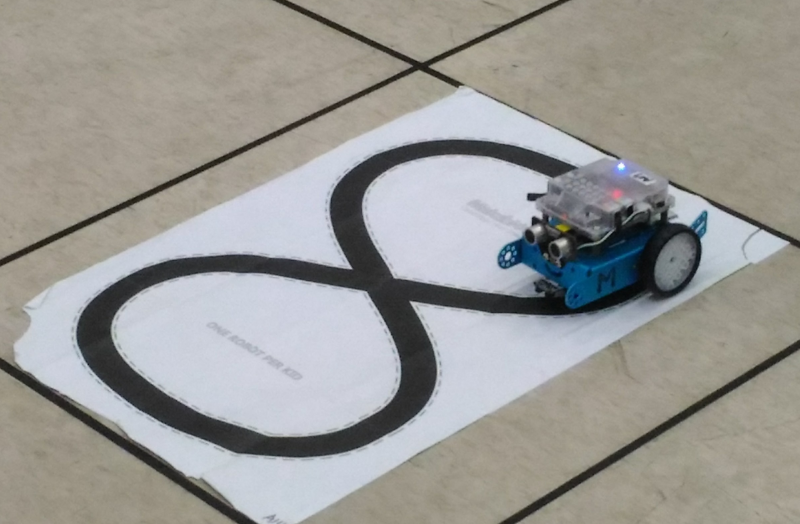
第11週 循線感應器2 沿著黑線走~8字循線、走香菇與自設圖案 (2018.05.02)
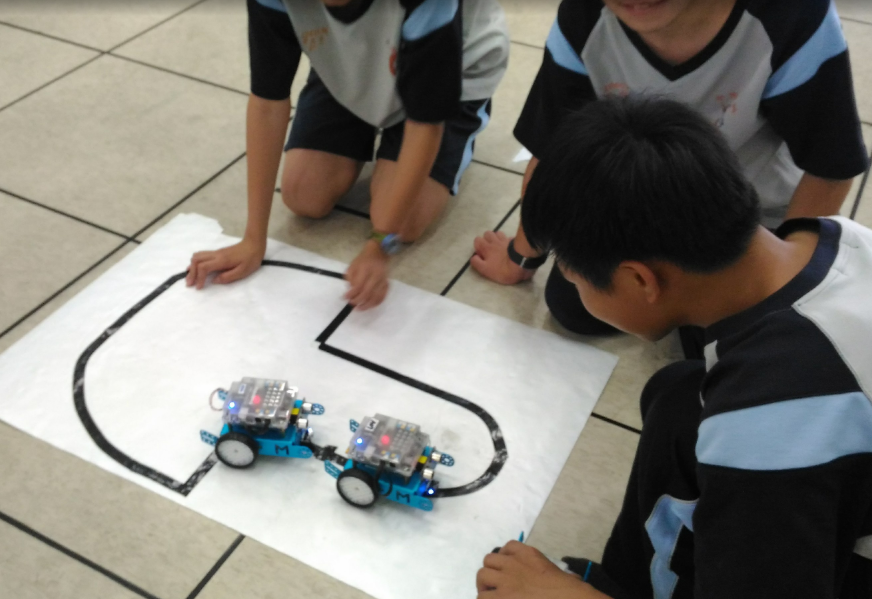
第一堂 複習巡線感應器與自我檢查,這節課延續走三條黑線,並讓學生先自行挑戰走8字,並用相同程式走香菇與自設圖案。
第二堂 我的教學方式是讓學生先試,最早試出來的加分,之後才"教",並請學生做筆記在生活科技課本上。今天,老師,為什麼我的會往回走?你要怎麼修改?
學生們先用簡單的012功能,這個就足以走很多狀況了,轉速不要太高。
先走8,再走香菇圖案,再走自設圖案。如果都通過,就代表這任務完成。可以繼續挑戰迷宮,但~迷宮會發生迴轉問題,要用簡單程式就通過,沒那麼簡單呢!
過程中,學生不斷提問也會發現,很多車子走起來都會抖抖抖,這是程式問題,不是轉速。通常~線越細越會抖。(如何修正?下周教)
然後,請不要一直問老師(why),它進到迷宮,為什麼會迴轉?而是去嘗試,怎樣做(how),它才不會迴轉?簡單的程式不是萬萬通,所以其實要加入一些變數與判斷。下周要教如何不一直抖啊抖(其實就只要有一邊壓到黑就前進,不必一直隨時"修正"),並講直角銳角。

第12週 超音波 (2018.05.09)
這周介紹超音波,這學期時間很趕,之前的超音波都還可以做超音波琴並與舞台互動呢!
學完超音波,就可以練習循線繞障與走迷宮了。
第一堂 介紹超音波,與檢測超音波功能的方法。練習:遇到手手就停車,以及遇到手手就隨機左右轉。隨機左右轉需要用亂數,這裡再複習一下餘數概念。
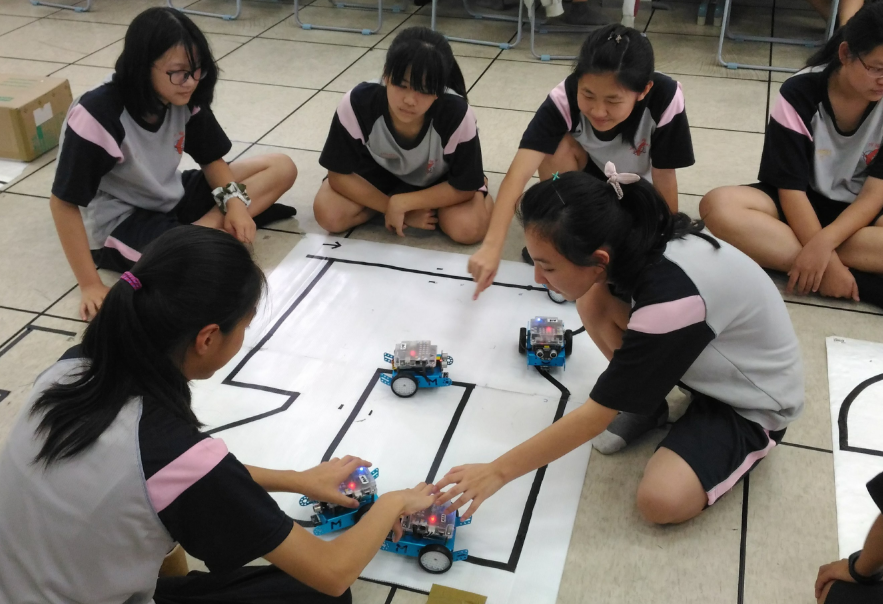
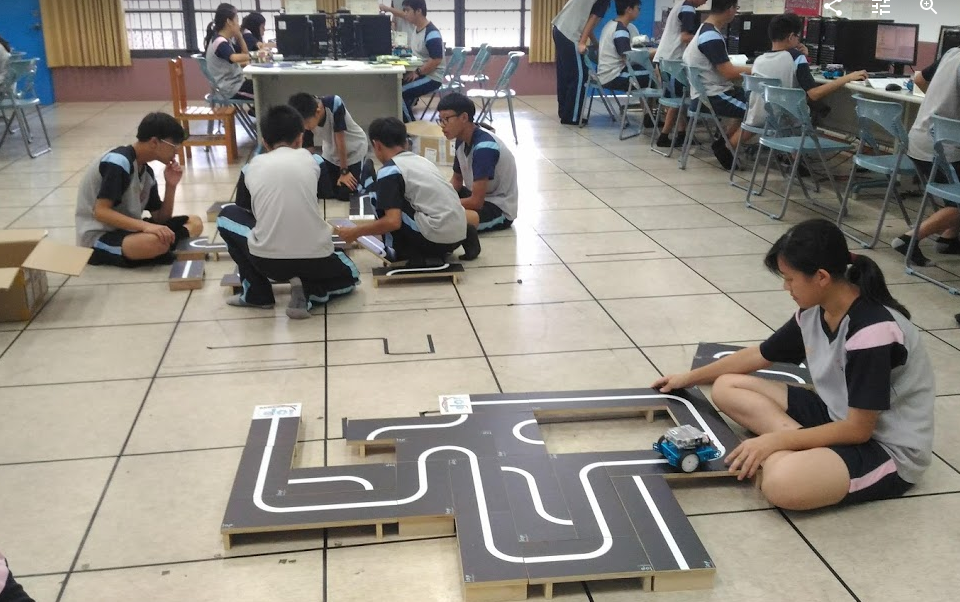
第二堂 學了超音波,就可以走迷宮了。迷宮路線中也有黑線,學生可以選擇是以循黑線方式,或超音波,或是自訂循序結構控制左右轉。迷宮內有分數,進去之後,最遠到多少,分數就多少。成功走出迷宮100分。

第13、14週 循線繞障與逃出迷宮 (2018.05.23)
第13周因為段考,所以暫停一次。
第一堂 自由練習。教室內佈了關卡,迷宮、銳角直角虛線循線、循線繞障。學生必須相互討論,當然也可以上網自學。(要從網路上找合適的資料且能懂其中邏輯還不容易。)
透過測試,學生發現問題。繞障後不會走到黑線?怎麼走虛線?車車困在十字路口?走起來都會抖抖抖?發現問題,觀察問題,提出可能的原因,尋求解決(自己想?上網查?)
" 我發現了車子有這個問題,推測是因為某某原因,為了讓車子能夠順利怎樣,於是我可以什麼修改。"

第二堂 介紹二個參考網頁:
mBot 入門教學:mBot 循跡車:這篇很棒,特別是裡頭的直角銳角轉彎,與轉動上限概念。
mBot 教學8 巡跡控制應用:這篇要提循線繞障,特別是在35-37頁。

第15週 迷宮、循線繞障考試 (2018.05.31)
(尚未紀錄)
第一堂
第二堂
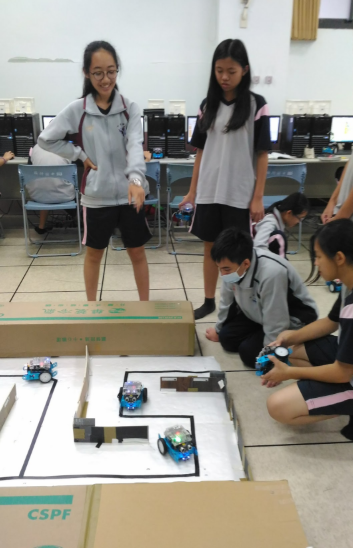
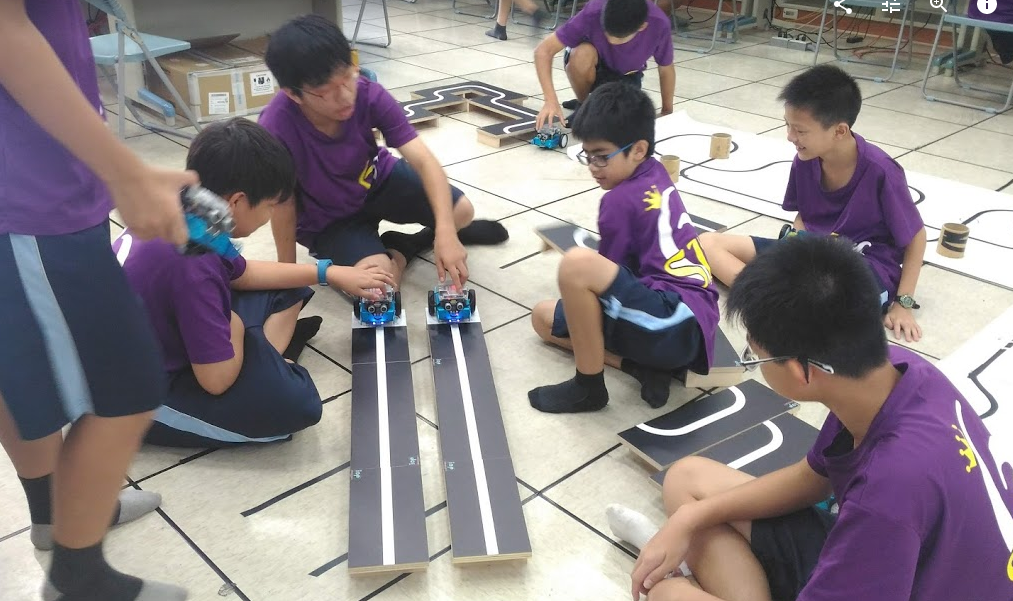
第16週 巡白線軌道接力 (2018.06.7)
第一堂 延續之前的團隊活動,小組利用紅外線呼叫。利用巡黑線的原理,改成巡白線。
白線軌道是之前買的,優點是可以組合成多種軌道(又能玩軌道競賽),白線較寬,所以程式可以很簡單,只要利用"如果與123"就可。以。但因為式軌道,所以離地面有一定高度,當轉彎弧度過大,車子的一輪有可能會卡在軌道。學生必須隨時監控車況,不能讓車車脫軌,也避免車子相撞。
第二堂 當學生注意到相撞問題,就可以提醒學生運用超音波偵測。若是離前車太近,可以適當減速;若是跟前車菊犁差很多,也可以加速。或者設計成與前車維持一定的距離,自動跟隨。最後讓學生小組三人一車,進行巡白線接力。簡單版是只接一次,進階版是接完一次繞一圈再一次,也就是重複不斷地在迴圈裡接力。
mbot的變化很多,基本上老師就是不斷丟任務,前半段是教,後半段就是讓學生應用。
目前~我還沒有跳脫mbot,將MBOT再多加幾組超音波或紅外線感應,做出理化教學的應用。輪子馬達的活用,也是我之後要嘗試的。
第17週 個人操作考 (2018.06.14)
我計畫在這周進行個人的操作考試,每個人抽一個簡單的小題目,然後利用10分鐘的時間進行。全班都一起聚集,然後依序讓不同題目的同學上場,實車演練。可以看個人手寫筆記,不能看之前檔案或上網查詢。
基本題目:
個人操作考過程:
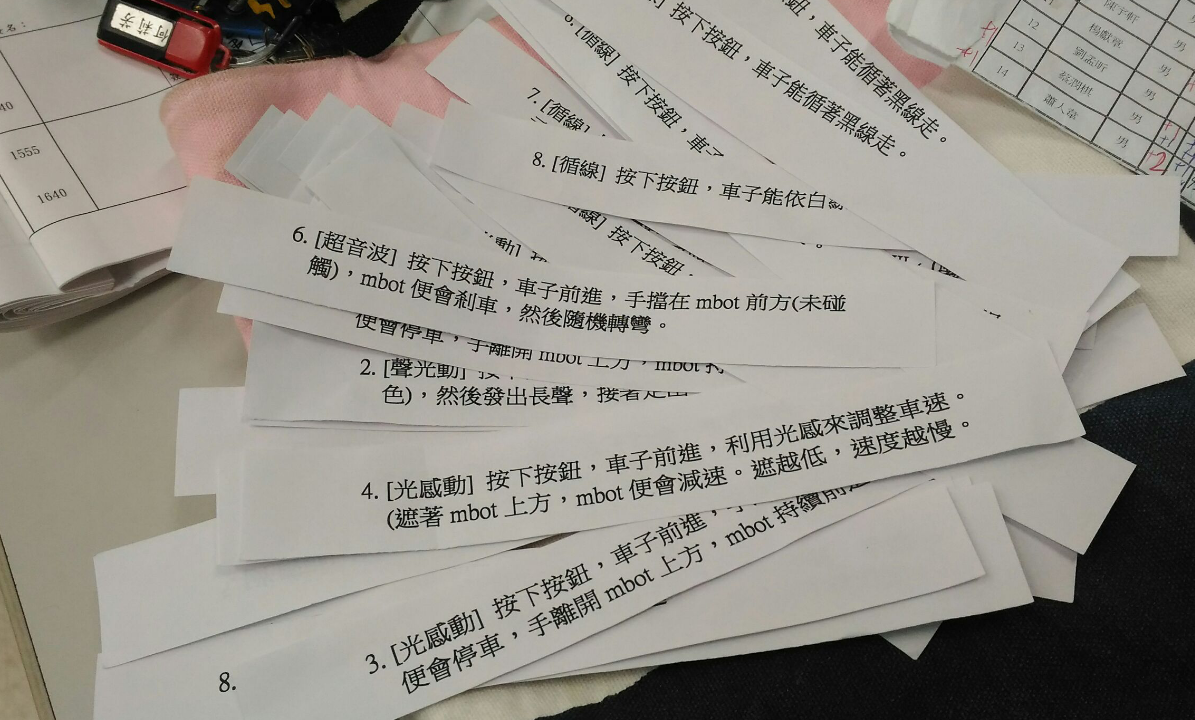
- [聲光動] 按下按鈕,車子先唱簡單的旋律,左右LED輪流依序發出紅橙黃綠藍靛紫的色光。注意:一邊燈亮時另一邊要暗。
- [聲光動] 按下按鈕,車子的燈光先同時閃爍三次(不同顏色),然後發出長叫聲,接著走出一個圈圈。
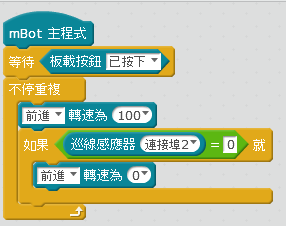
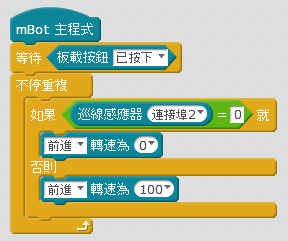
- [光感動] 按下按鈕,車子前進,手遮著mbot上方,mbot便會停車,手離開mbot上方,mbot持續前進。
- [光感動] 按下按鈕,車子前進,利用光感來調整車速(速度隨遮光程度而變)。手遮著mbot上方,mbot便會減速。
- [光感動] 按下按鈕,車子前進,利用光感來調整方向。手遮著mbot上方,mbot便轉彎,遮越久轉越多。不遮則直線前進。
- [超音波] 按下按鈕,車子前進,手擋在著mbot前方(未碰觸),mbot便會剎車,然後隨機轉彎。
- [循線] 按下按鈕,車子前進,經過三條黑線就停車,提示:要搭配變數。
- [循線] 按下按鈕,車子能巡白線前進。
- [循線] 按下按鈕,車子能循黑線。
1.抽籤(9題抽一),不可上網討論也不能找舊檔,只能看自己的筆記(如果有抄)
2.操作考,完成後將車子依序放好。
3.全班都好(或時間到),一起觀看,同題者一起測試並給分。
大家很好奇別人的題目,學生說有一題是魔王,我覺得是基本都教過啊~

第18週 創意軌道大賽 (2018.06.21)
這週我公假,請同事幫忙代課,進行創意軌道大賽。
本學期結束。
下學期挑戰新任務,國二多一節的寫app與mbot仿生獸的新課程。我還要學習與自我進修。