
自動目錄
MBOT上有一個循線感應器,藉由物體表面的紅外線反射來決定是黑或是白。
循線感應上有兩個偵測器,分為 Sensor1及Sensor2 ,但由於安裝時轉了180度安裝,因此 Sensor1 代表程式上的左偵測器、因此 Sensor2 代表程式上的右偵測器,這裡要特別注意。
循線法主要分兩種,一種是兩個感應器都偵測到黑線(或白線,以下以黑線說明)則前進,稱之為「中央循線法」;而單邊偵測到黑線才前進的,稱為「(左/右)側循線」
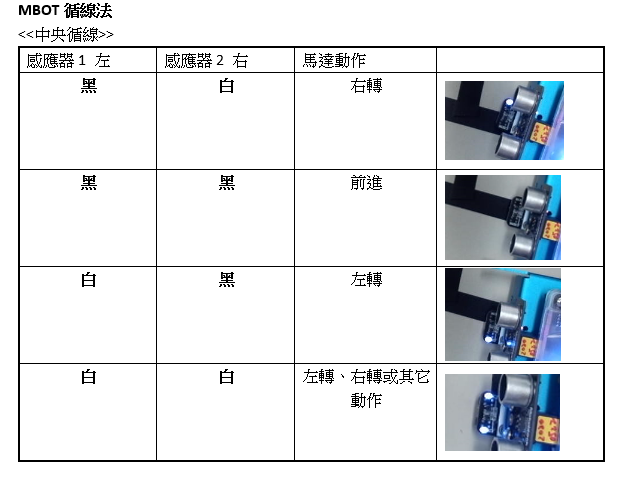
中央循線法
條件
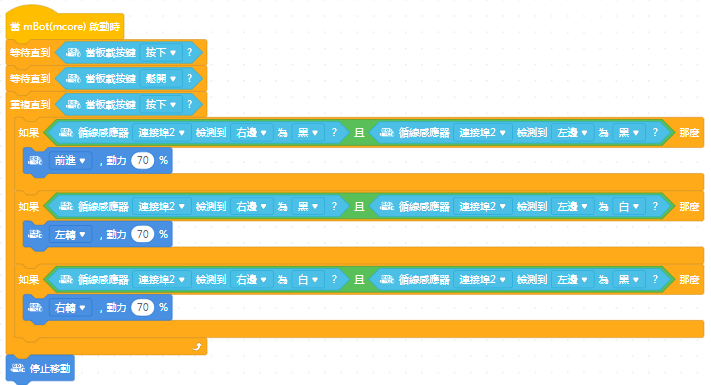
程式
討論
1. 線徑不能太細,以免兩個感應器無法同時偵測到黑線。
2. 遇到雙白時,需特別處理
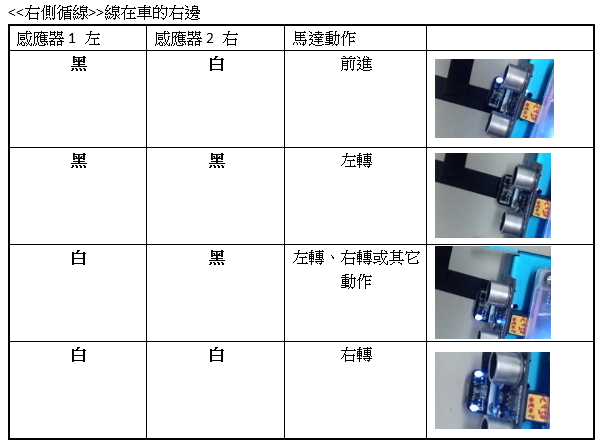
右側循線法(線在車右邊)
條件
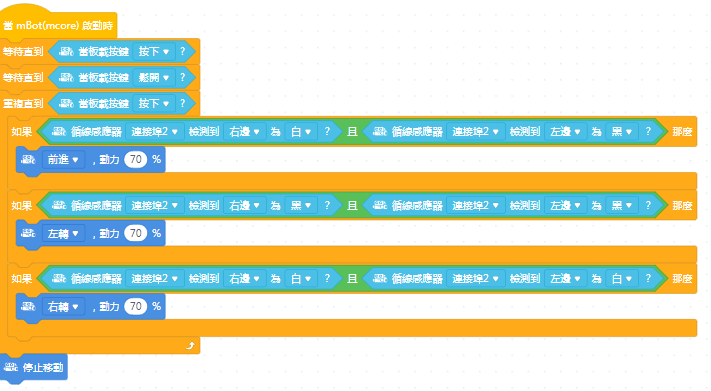
程式
討論
1. 適合需要右轉的地圖。
2. 遇到十字路口時,需特別處理
左側循線法
條件
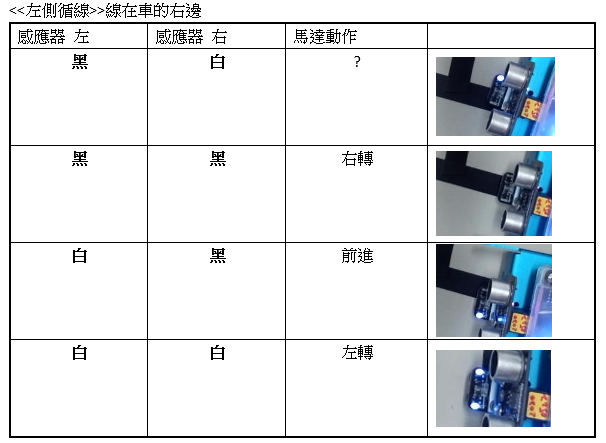
程式和右側循線類似
END
