進行了一學期的scratch教學後,這學期課程來到了mbot。第一次教mbot,這篇是我2017初次教mbot教學記錄。
第二次教mbot,有點經驗後,就對課程安排做了調整。雖然大家都連結到2017的這一篇,但我比較喜歡2018年版的這一篇:
[mbot] 我的mbot 教學記錄II (2018~) @zfangの科學小玩意
輸出裝置: :LED、蜂鳴器、馬達
感測或輸入裝置:光感應、超音波、紅外線、按鈕、遙控器
第一週 基礎介紹 (2017.02.14)
第一堂 基礎介紹、安裝軟體、影片補充( [mbot] 進入mbot課程前後可以看看的幾段小影片@精讚 )。
第二堂 認識mbot、連接與測試馬達(前進、轉彎)、上傳程式練習,離線自走練習。 [mbot] mbot連線概念整理@精讚
第二週 認識輸出裝置:蜂鳴器、LED(板載) (2017.02.21)
第一堂 蜂鳴器([mbot] 讓機器人唱歌(蜂鳴器)@精讚)、編一首曲子,可以是兒歌或喜歡的歌曲,自行上網找簡譜。簡單講解聲音。發mbot測試。
音調與節拍也可以輸入數值,之後能以變數控制。注意:一拍=1秒=1000毫秒。1/4拍=250ms
有的學生會不小心用成
,這個無法讓mbot發出聲音。整首歌都打完才發現,慘~~
第二堂 講解光的混色( [mbot] 閃閃爍爍的七彩(LED)@精讚 ),發下mbot,測試LED燈(輪流彩虹色與左右不同色)與蜂鳴器(播放剛剛的歌),同時唱歌與閃燈(左右要不一樣)。usb連線,不上傳arduino。此次作業存檔(*.sb2),下週結合其他元件再繼續。mbot的LED亮度很高,參數勿設定過高(60~100也可)。勿長時間直視LED,以免傷視力。
第三週 手忙腳亂的鍵盤動物音樂會1/2 (2017.03.02)
本週因228連假,109、110課程暫停。
原本要進行馬達功能相關單元,讓106學生測量轉數秒數與距離關係,比較四種轉彎模式與利用時間與轉速差進行轉彎角度控制...看似很美好~ 非常像作科學實驗並記錄數據的感覺,講義也打了。結果~~全班的2.4G都無法work,即使顯示2.4G已連接、綠燈、2.4G亮藍燈,甚至回復出廠設定、更新韌體都試了,還是很詭異的不能控制機器人。(家裡的那台正常~ 後來發現2.4G無法work是因為電力不足,第四週做調整) 下一堂課趕緊改課程。接著的三個班,都如此調整。
第一堂 回到舞台模式,執行任務"以鍵盤控制蜂鳴器與LED,並讓舞台上的熊貓們依音符跳躍,並讓mbot產生聲光變化"。對已學過半年scratch的學生來說,不難。
主要用到的積木
。
也有學生用
(但這個不能上傳),也能用紅外線遙控器控制
第二堂 繼續上一堂的操作。動作快的幾位同學,讓他們提早測試超音波感測器,利用超音波感測距離來控制音樂會的聲音與光。完全不講解,幾位學生挑戰,成功了。之後會延續聲光與超音波感測,並將變數代入聲光變化,除了做空氣鍵盤外,也配合馬達行走模擬倒車雷達。
第四週 拆解mbot檢查零件與鍵盤動物音樂會2/2 (2017.03.07)
本週因學校舉行活動(大家說英語、走讀中科),106、113二個班的課程暫停。
後來發現2.4G無法work是因為電力不足。大夥開會討論,配合各班用電不一、課程進度與學生個人使用習慣不同,因此從下週起讓學生自備電力足夠的電池來上課,避免整批汰換電池(部分還有電)造成浪費與環保問題,也不會受別班影響。各班各人需求,學生自己負責。
第一堂 使用螺絲起子拆解與檢查各零件馬達,電池安裝、介紹與節電說明。下次上課學生需自備四顆同款同電力的3號電池(充電電池亦可),碳鋅電池與鹼性電池不可混用。
第二堂 持續上一週,"以鍵盤控制蜂鳴器與LED,並讓舞台上的熊貓們依音符跳躍,並讓mbot產生聲光變化"。
第五週 超音波感測器1/2~無關馬達的幾個應用 (2017.03.14)
在超音波感測器的教學內容,我分成2~3個部分。第一部分結合之前的LED與蜂鳴器先做基本介紹,並練習與馬達無關的二個操作。下次上課才會教馬達(轉彎調整),並與超音波感測器,進行避障、跟隨與密室逃脫。
第一堂 (花一點時間檢查電池與安裝) 講解超音波感測器功能,讓學生用手掌在超音波模組前方移動,觀察測試超音波模組偵測範圍。介紹變數與四捨五入,也簡單講一下清單。本堂練習: "超音波計數器:前方(例如距離5公分內)有障礙物通過,會自動將計數值增加",讓學生以手掌測試。另外如果時間夠,也可以測一下超音波的量測角度。
第二堂 延續之前任務並模仿空氣吉他(以紅外線偵測),本堂任務:"空氣鋼琴(超音波琴),以手掌改變與機器人距離,控制蜂鳴器唱出不同音調與旋律的歌(LED也要隨之變色)"。完成後,寫入機器人(上傳Arduino),以離線方式"走唱與演奏"。
搭配
與 運算積木。
附註:113部分超進度的同學(方彥、韡蓁),則出加分題給他們挑戰:"切切切~彈彈彈,以手掌不斷切入超音波感測器前,讓舞台上的角色切換造型行走,切一下走一步,狂砍切則角色變跑步;並同時能改變操控手掌與機器人距離,使舞台上的角色依據超音波改變距離而跳躍不同高度。超音波距離變化越大,角色跳越高。" 小蒨建議我,還可以換背景,讓角色跳過一個個障礙,就像chrome的恐龍小遊戲。
本週課程細節已整理在這一篇 [mbot] 超音波感測器(1/2) 幾個非馬達的簡單應用:超音波琴、計數器@精讚。
第六週 直流馬達的應用:離線自走~機器人前進轉彎與避障 (2017.03.21)
本週主要是介紹直流馬達(終於讓mbot車離線自走了~上傳Arduino) 。
以過三關的方式進行。
- 第一關 直角練習,離線讓車子走正方形。
- 第二關 緊急煞車,在障礙物前方5公分處會停止。
- 第三關 避障轉彎,偵測前方5公分處有障礙物,立即停止,後退並轉彎。
第一堂 講解馬達功能,拆解輪胎,讓學生檢查馬達螺絲是否鎖緊。本堂練習: "如何讓車子做直角轉彎?",完成讓"離線讓車子走正方形"。看起來簡單,但是狀況很多,例如:電池盒斷線、無法連線、不能上傳等。好在,只要重複幾個檢查步驟,學生多半能自行解決。配合離線自走,在主程式下方多加一個等待積木~等待板載按鈕已按下。
有些同學會抓到等待幾秒,這是行不通滴!
第二堂 自我測試超音波功能(第五週課程),並結合超音波感測距離的偵測,讓行動中的機器人判斷煞車與避障轉彎。本堂任務:"在障礙物前方5公分處會緊急煞車"、"持續前進,偵測前方5公分處有障礙物,立即停止,後退並轉彎。"
本周課程細節已整理在這一篇 [mbot] mbot的直流馬達介紹@精讚


第七週 馬達+超音波2:離線自走~繞過障礙物、遇障隨機轉彎、密室逃脫 (2017.03.30)
本週因學校段考(3/28~3/29),星期二的109、110班停課。下週因為清明連假,星期二的109、110班還是停課。星期四的106、113進度要調整。
國一的女兒說,要讓學生喜歡,電腦課要常常讓他們自由活動。我想,zfang老師應該不會為了要讓學生喜歡而讓他們自由活動。但如果是任務完成,也許就有一點時間自由喔!
仍以過關的方式進行。連同上次未完成的。基本上~第四關結束後,就可以跳第六關了。
- 第四關 避障轉彎,偵測前方5公分處有障礙物,立即停止,後退並隨機轉彎。(這個要再教一下判斷,主要教餘數的應用。)
- 第五關 繞過障礙物,直行過程,遇到直立的障礙物,會繞過,繼續前行。(在無循跡的情況下,其實直行並不容易。)
- 未來的第六關 密室逃脫或走迷宮,將車子以任意方向放在電腦教室迷宮的入口,讓車子自己由出口繞出來
第一堂 依然的電池盒、連線與超音波測試。主要進行第四關,若是上次的三關還沒做到,就繼續完成。讓學生試過再講解隨機轉彎的幾種方法。隨機轉彎的測試是用手掌來擋,車子會隨意左右轉,互動很有趣。另外,這時就可以試第六關學生密室脫逃成功,他說~秘訣在於拉大超音波的反應距離,原先設定的5公分,常常會讓車子在轉彎時與牆壁卡住。若是將距離拉成10公分,就不會卡住而能成功脫逃!有些女孩用手掌引導車子轉彎~過程頗有趣。不少同學也主動完成了闖迷宮喔!
113學生方彥寫的(下圖左),他已經成功能過迷宮。有別於其他follow我參考方法的同學,這孩子喜歡自己試方法(非常棒),雖然有點繞路,但是成功囉!(他說~有些等待時間因車子而異,他的程式未必通用每台車,使用者要自己微調。)
或
(我給學生的參考)
第二堂 主要是做第五關,非常意外~第五關很難!這關與前面第一關的走正方形有關喔,很多同學繞完之後方向都會偏。以後配合循線感應會比較容易。觀察到,幾個小女生會找夥伴一起闖,寫程式、上傳、離線自走,當車子挑戰成功時她們會很興奮地擊掌呢!這種開心~好可愛。這堂課會提早進行收尾(上傳檔案*.sb2、mbot回復原廠),給考後的他們放風一下下~一下下!
狀況依然多,但學生們會彼此借用車子、線材與電池盒解決問題,也會討論,很棒。今天的課過得很快,五月天的歌也很好聽~~意外地,他們沒有吵著要放風!
本週部分課程可以參考這一篇 [mbot] 超音波感測器(2/2) 結合馬達的簡單應用@精讚
第八週 放假+公假= zfang躲貓貓(進入光感的暖身活動) (2017.04.06)
本週星期二的109、110班因連假停課。星期四的106、113公假,請同事代課。
使用熊貓程式、不拿mbot。不能用現成的角色與背景,可以修改或自己繪製。
指定任務:小強躲貓貓 (此單元109、110會跳過,一起進入光線感應器,用"光"與mbot互動。)
角色背景製作:
- 二個背景,一個白天,一個晚上,以空白鍵切換白天晚上,按一下白天,按一下晚上。(提示:用變數,除以2的餘數)
- 三隻小強,大中小,不要用分身功能。動作不能一樣,小強四處亂竄的方向、持續時間與速度,要用亂數。
- 一個遮蔽物,小強出沒處。
- 一盞燈或燭火,三種亮度(暗、半亮與全亮),以A鍵切換,按一下半亮,再按一下全亮,再按第三下變暗。(提示:用變數,除以3的餘數)
動作說明:
- 也可以做不是蟑螂,但出沒行為與日夜有關的動物,例如螢火蟲、扁蝠或人。以空白鍵切換白天晚上,按一下白天,按一下晚上。白天,小強躲起來,晚上才會出現。
- 晚上如果有開燈,小強的動作會受燈光控制,燈光暗時爬很快,燈半亮時速度變慢,全亮時躲起來。白天開燈,燈一樣會亮,但小強還是躲起來。
- 程式中至少需要幾個變數:速度、方向、日夜切換、燈光切換
下次上課再教學生改用mbot上面的感測器或按鈕控制遊戲,或直接用mbot來模擬小強。
第九週 光感練習與緩衝~調整四個班進度 (2017.04.11)
放假+代課=混亂,本周空一點,讓109與110追上進度走[第七周課程],並且完成第六關迷宮。也讓106與113學生完成之前關卡,講一點光感。
第一堂 拆外殼,介紹光感(光敏電阻)。簡易任務:用光控制聲音與行動。"光暗,蜂鳴器叫車停止;光亮,車停止。"
第二堂 讓學生完成之前關卡,與第六關。(有興趣的學生放他們上網自學循線)
第十週 光感還是動感?喝醉酒的mbot (2017.04.18)
109與110還在追進度,但已進入光感練習。
第一堂 光感互動小遊戲,舞台與mbot的結合。二個背景(日與夜)、一個遮蔽物、一隻小動物,用手掌遮住光感,切換日夜。晚上小動物亂爬,但在白天的時候,小動物要躲回去遮蔽物(是"突然隱藏"喔)。下圖為學生鮑佑華的作品:


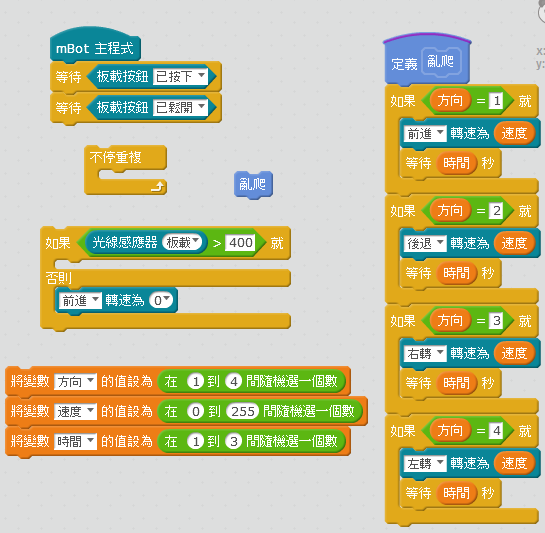
第二堂 離線自走~mbot躲貓貓,學習副程式(自訂積木),與多一個等待,等待按鈕已鬆開。亂爬的三個變數:方向、速度、時間。光亮時,mbot會在地上亂爬,時而前進時而轉彎或後退,忽快忽慢。光暗時,停止不動。學生說~mbot很像喝醉酒。程式本身很簡單,但是~測試連線與光感就花時間。只給學生簡單說明,先讓他們自己試,再給他們參考圖示,自己試。
113因為進度較快,所以完成之後,又多一個加分任務,將光感與超音波結合:在光亮的時候,喝醉酒的mbot遇到障礙物會停下來唱歌直到障礙物離開,然後繼續爬。也就是說,當手掌放在mbot上方式控制光線,若手掌擋住超音波則是令它唱歌,擋多久唱多久。
運用
或
,將上一堂課的程式加點東西就可以了。

第十一週 調整進度(2017.04.25)
109與110進行前一周的mbot喝醉酒,原本進度領先的106與113則因zfang公假暫停一次,這下~四個班的進度終於一致了。
第十二週 紅外線(一)初體驗~說出黑與白 (2017.05.02)
終於進到紅外線的課程了,基礎介紹分二周進行。
第一堂 說出黑與白
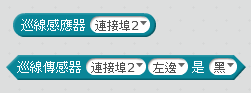
介紹紅外線感測器,肉眼看不到紅外線但鏡頭可以,透過webcam裡可看到前端的粉紅色亮點。循線主要是利用二組紅外線,運用積木有二種:
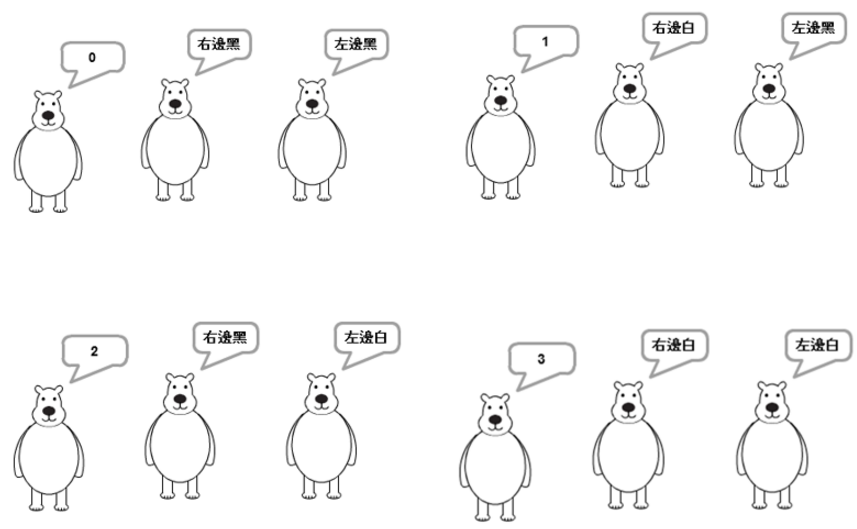
作業:挑三個角色,讓角色1說出循線的值(0123),角色2負責說出左邊是黑還是白,角色3則是右邊。透過操作來學習回傳值0123代表的意思。順便複習截圖剪取與貼到word。
第二堂 我怕黑,遇到黑線就停止
讓車子行走,模仿之前超音波的任務,在途徑上如果遇到黑線(0)就停止。任務變化:遇到黑線就隨機轉彎。電腦教室地板都是黑線,所以機器人會困在黑框之中,如果在黑線上放一張小白紙做個缺口,mbot就會走出~變成密室脫逃... 只是...又進入下一格地板黑框,繼續困在黑框中。
動作快的讓他們試加分題:遇到第三條黑線才停止。利用變數紀錄通過的黑線數,直到第三條之前都不斷重複前進與計數。這裡要注意的是黑線有寬度,要再等待0.5秒(依黑線寬度調整),之後的黑線才會再計數,否則一旦進入黑線區就會不斷計數讓變數一直增加。
第十三週 紅外線(二) 沿著黑線走 (2017.05.09)
紅外線重點,沿著黑線走。
第一堂 用椅子與地板上的格子作示範講解,如何修正方向。利用吳錫修老師投影片再說明。
參考:https://www.slideshare.net/sshiouwu/mbot8-65531912
讓學生自己寫程式,試著離線走地板黑線。(也補充了當黑線很窄時,不一定是用0作為前進依據,也可以用2或1走在一黑一白上。) 最要挑戰的是:當車子偵測到3(左白右白)時要如何調整?此外,如果走到黑線盡頭,車子要如何讓它回頭?十字路是要通過還是要轉彎?如果黑線變成了虛線呢?這裡都還有許多變化。
第二堂 加入超音波感測功能。任務:循黑線走,遇到障礙物要能夠繞障轉彎,而且還要再走回黑線上繼續走。基本功能已經都學了,帶學生看一些影片,讓他們知道~變化可以很多,而題目與道具,打算讓他們自己做自己出。(自己要先能過,才能考別人~~)
第二段影片的第二小段會動的白色積木(泡棉?)讓我心動。黑與白~真有趣。
第十四週 段考周~ 紅外線(三) 循線避障練習 (2017.05.16)
本周段考,109與110只上機一堂課,另一節自主學習。106與113遇到考試暫停。
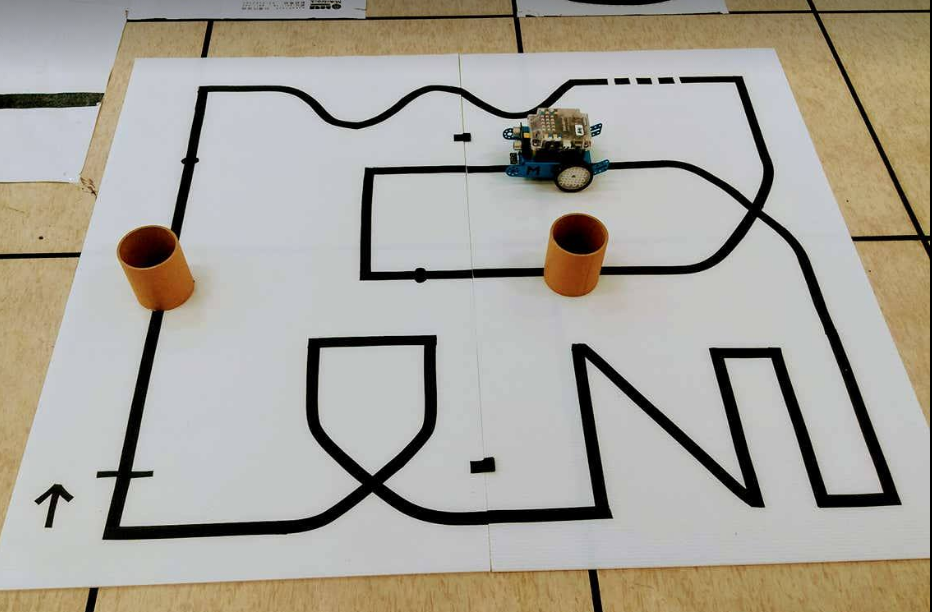
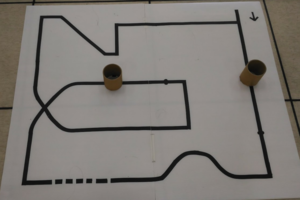
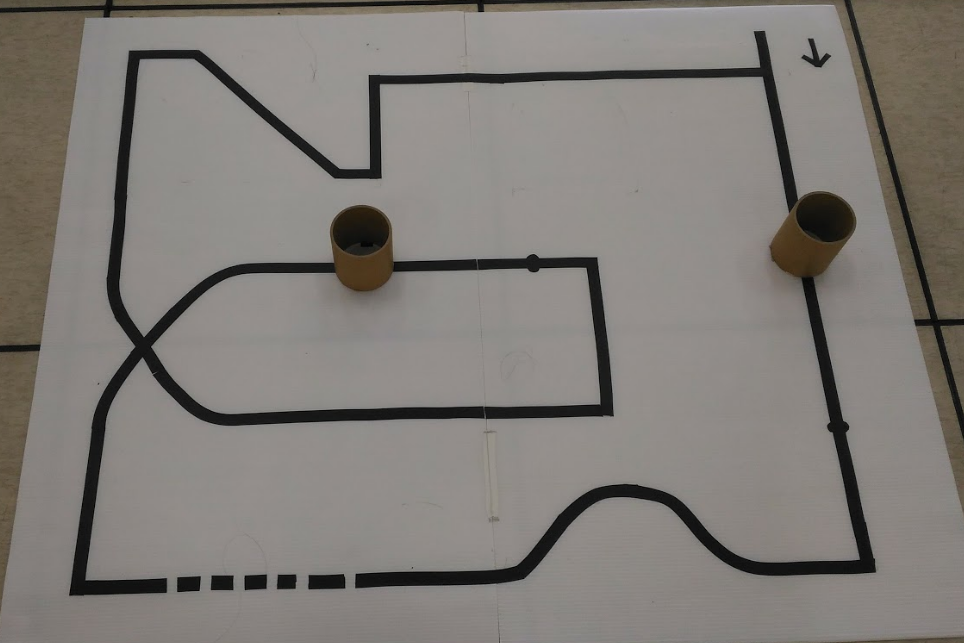
在學生自主學習時,用二節課時間,在兩張PP瓦楞板上以電火布貼出一個循線避障挑戰。
魔王1:遇到障礙要繞過,且要在黑點前回到黑線上。
魔王2:直角與銳角挑戰,其中銳角有左轉銳角與右轉銳角之分。
魔王3:二個路線交叉,有些mbot繞不進去。
魔王4:虛線挑戰。只先做到這樣,之後再擴充。相片上的mbot只是模特兒,它的方向不正確。
學生任務:"自己設計程式,解決四大魔王。"
任務尚未成功,下周繼續努力。
第十五週 練習 (2017.05.23)
ZFANG公假,代課老師讓學生進行循線繞障練習。(這學期~ 好像公假有點太多@@)
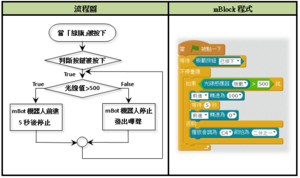
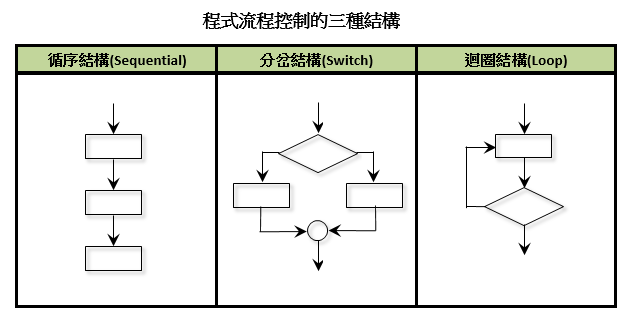
第十六週 流程圖 (2017.05.30)
0530 星期二端午節放假。0601 星期四講解流程圖。
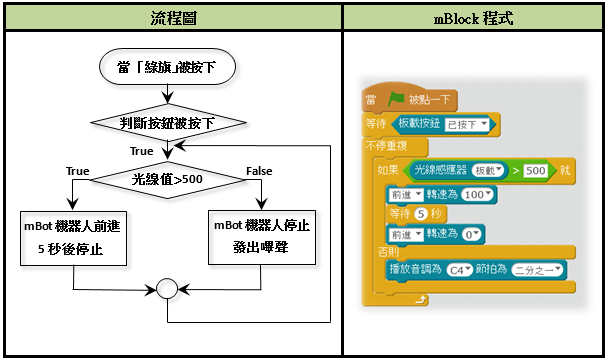
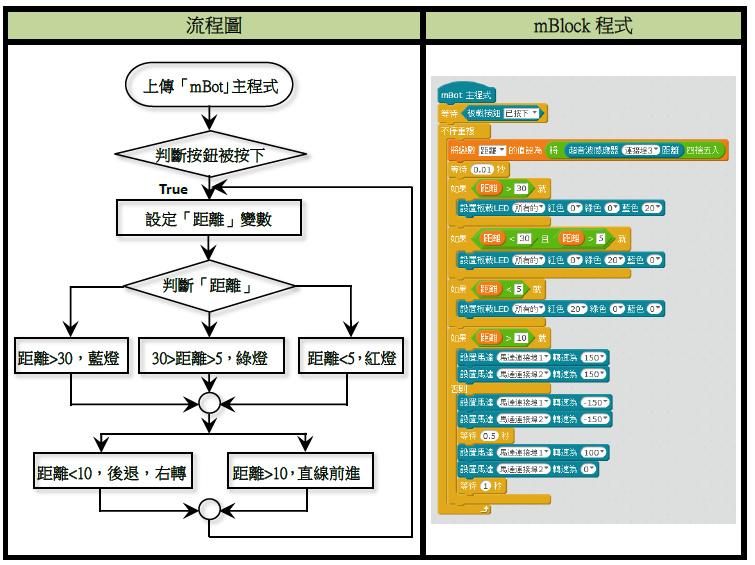
校長說,流程圖比會拉積木重要。而我卻一直沒教這一塊,花了一些時間講流程圖的畫法,也舉一些實例。這節課讓學生帶紙筆做筆記,期末前要完成手繪流程圖(參考路考的程式)。
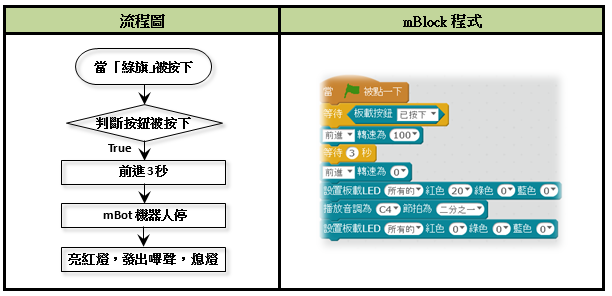
第十七週 機器人車路考 (2017.06.06)
星期二109.110進行mbot路考說明與練習。星期四 106,113進行迷宮路考測驗。
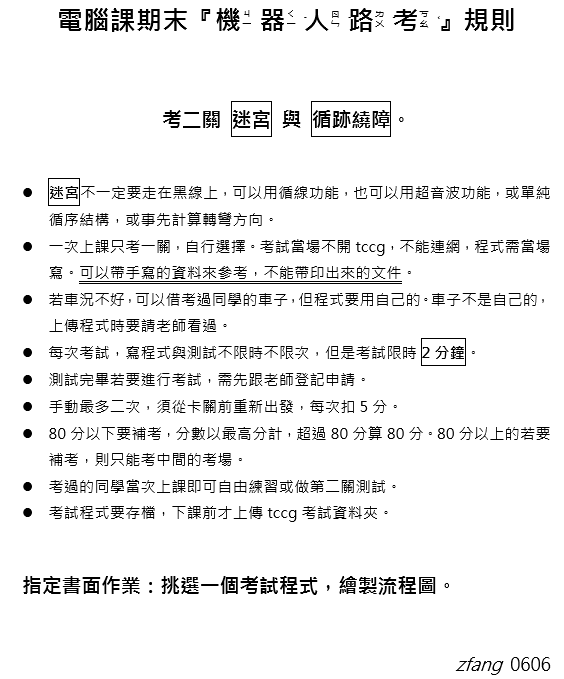
第十八週 練習與路考 (2017.06.13)
非常好~ 我親愛的同事把
的迷宮拆了。
迷宮是親愛的同事蓋的,要拆我也沒辦法,什麼時候拆也由他高興。
只是不懂,那個我花很久時間(手拙)貼的循線圖......為什麼之前他們覺得雙銳角路徑很難(或會讓MBOT誤判)就可以用很短的時間擅自改掉原有路線而完全沒有知會呢? 這是ZFANG上課要用的啊!
沒考到的同學與班級就...... 只能臨時更改考試題目。
星期二109.110 進行mbot循線測驗。因為考題變得太簡單,所以幾乎都很快過關。110的時間較多,因此在最後的20分鐘講解MBOT接力,從原本的循線功能去修改,利用板載紅外線發射(廣播訊息),讓另一台車接收。這將是下次加考的測驗項目。

第十九週 MBOT接力 (2017.06.20)
公假,同事代課。教最後一個功能,發出訊息與接收訊息。進行接力活動。
本週最重要大事~ 第一屆福科mbot機器人大賽。整個下午,各班派出代表隊進行一場看似簡單卻不簡單的機器人循線與循線繞障PK。這也算是一年級資訊與科技課的成果發表方式之一。
[ mbot ] 幸福程式 科技奇機~福科國中第一屆班際 mbot 機器人競賽記錄@zfangの科學小玩意
看了學生的成果,再看看自己......換作是我參加比賽,不見得會有他們這般表現。
zfang適合教與引導,就這一張嘴。


第二十週 MBOT~(2017.06.27)
最後一節電腦課,讓學生試著上網找答案,特別是循線繞障的程式,有沒有好心人放在網路上呢?很有趣,學生常常會找到精讚,這個網站的程式寫得很好。循線部分太忙了,所以還沒有時間把資料放網路上。
希望我的學生能夠利用網路自學,有餘力也能產出,做一個分享者。
上學期的scratch與這學期的mbot, 我這個為資訊老師的理化老師,也跟著學生一起完成課程。當然~還有很多變化與發揮,就留待之後看看可不可以再延伸了~
[mbot] 福科國中機器人下鄉營隊(1/2)~第一天活動紀錄@zfangの科學小玩意
[mbot] 福科國中機器人下鄉營隊(2/2)~第二三天活動紀錄與檢討@zfangの科學小玩意
[mbot] 福科國中機器人下鄉營隊~輔導員訓練記錄@zfangの科學小玩意


本學期教學日誌結束^_^
2018寒假,又完成一次機器人大手牽小手的活動,這是我們第二次讓國中生帶著國小學生學習mbot機器人。這篇,記錄我們的課程與活動並做了檢討與反思。[mbot] 2018福科國中大手牽小手科學冬令營~mbot機器人體驗課程活動設計與指導心得


106學年 新的一年級教學周記 [scratch教學] 國一上 資訊與科技課 教學記錄2017.09~@zfangの科學小玩意