

自動目錄
這篇紀錄我在超音波感測器的教學內容,預計分成二個部分。
- 第一部分結合之前的LED與蜂鳴器先做基本介紹,並練習與馬達無關的二個操作。
- 第二部分將馬達與超音波感測器結合進行避障與跟隨。
本篇是第一部分。
超音波感測器的功能
偵測與前面障礙物體的距離,可做為避障、跟隨或是偵測前方是否有障礙物,在迷宮裡是很重要的偵測工具。

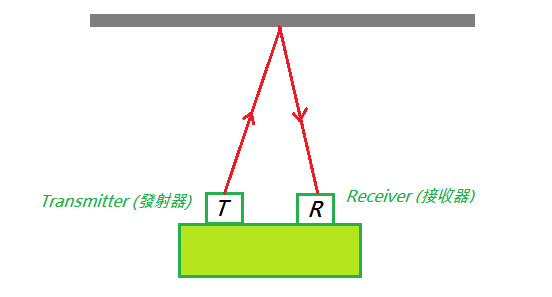
發射端超音波 (標示T),代表Transmitter (發射器),發射20kMHz以上超音波。
接收端超音波 (標示R),代表Receiver (接收器),接收反射回來的超音波。
測試超音波模組偵測範圍:
用手掌在超音波模組前方移動,觀察數值變化情形。提問學生:最大多大?最小多小?數值是用什麼單位呢?
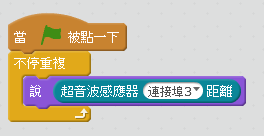 簡單程式說出數值,作為檢驗學生手上的機器人是否正常,能做到~才進行下一步驟。
簡單程式說出數值,作為檢驗學生手上的機器人是否正常,能做到~才進行下一步驟。
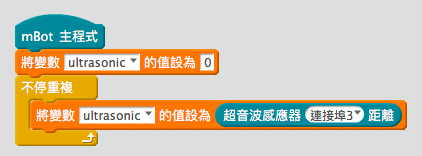 或是設為變數,並顯示變數值。
或是設為變數,並顯示變數值。
超音波模組預設接到mCore連接埠3 ,回傳值的單位是公分(cm),量測範圍在3cm~400cm。數值可以取到小數第三位,通常會搭配四捨五入的運算積木。
 比較二種回傳值的差異。
比較二種回傳值的差異。
或搭配清單,將數值儲存到清單。

另外如果時間夠,也可以量測一下超音波的量測角度。書上說~範圍為30度。
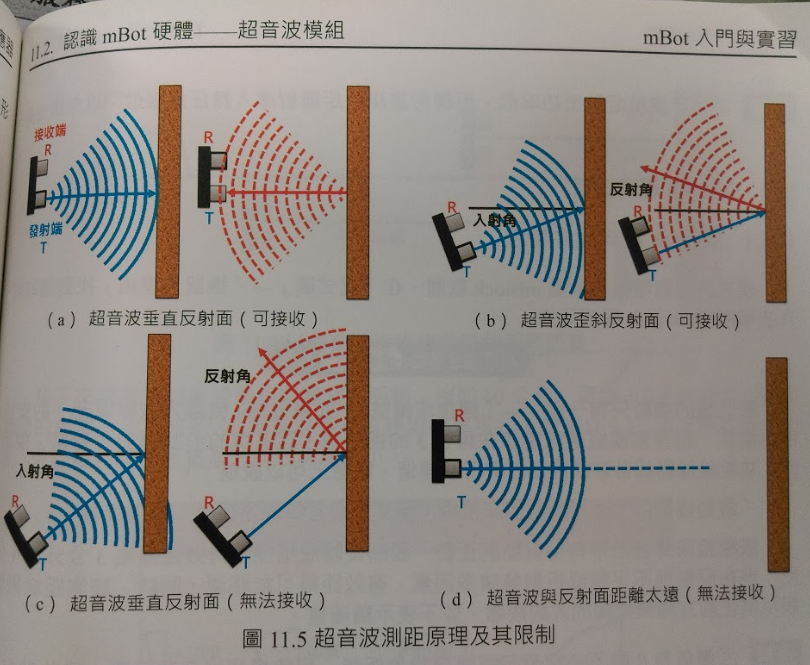 (相片翻拍自mbot入門與實習 吳志宏 翰吉出版)
(相片翻拍自mbot入門與實習 吳志宏 翰吉出版)
超音波模組幾個非馬達的應用
通常要搭配控制與運算指令使用
 或
或  與
與 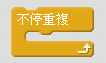
超音波琴
改變手掌與mbot前端距離,使機器人發出不同音調與各色燈光。
 這裡是用如果否則。(也會帶學生用如果作為比較。)
這裡是用如果否則。(也會帶學生用如果作為比較。)
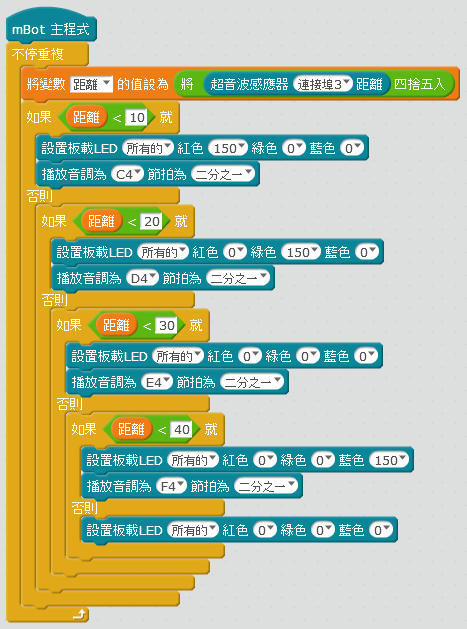
超音波計數器
如果前方一定的距離內,如果有障礙物通過,就會自動計數。讓學生以手掌當作障礙物。
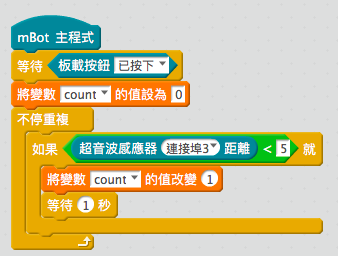
也能做為開關控制。
參考資料:
- scratch(mblock)程式設計 使用mbot機器人。 李春雄、柳家祥、李暐詒(台科大圖書)
- mbot入門與實習 吳志宏(翰吉出版)
- 全佑電腦多功能學習卡
END
