
自動目錄
新學期學校買了mbot的擴展套件,之後會安排讓學生組合,來做車車之外的機器人。
根據官網設計,有小青蛙(二足跳)、螳螂(二足爬+輪)與六足甲蟲。
青蛙以跳躍方式行走,令 mBot 變得更活潑。

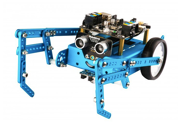
螳螂在 mBot 原有的滾輪外再加上兩隻螳螂臂,令行走時更穩定。
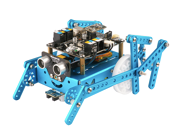
六足甲蟲將原本使用滾輪前行的 mBot 轉為使用六足前行,神似地模擬甲蟲移動的模樣。
不太喜歡仿生獸的名詞,明明走起來就不一樣啊!但是看到機器人以另一種方式動起來還是覺得有趣。
不希望學生只會照著說明書組合,希望學生能先透過影片與智高積木模擬了解連動關係。
連桿機構是四足與六足機器人的基礎,在網路上找到這些影片作為教學參考。
第一部分 四連桿
第二部分 四連桿 平行機構
第三部分 四足連桿機器人 M型連桿
第四部分 六足連桿機器人 M型連桿
上面的是mbot套件的六足甲蟲。下面這個很酷,走起來像小青蛙,跟M型連桿有明顯差異,應該是自己設計的。
END
