
自動目錄
新學期學校買了mbot的擴展套件,之後會安排讓學生組合,來做車車之外的機器人。
根據官網設計,有小青蛙(二足跳)、螳螂(二足爬+輪)與六足甲蟲。
6-Legged Robot Pack 是一款基於 mBot 設計的 3 合 1 搭建擴展包。可做出至少三款不同型態:「六足甲蟲」、「螳螂」和「青蛙」,享受改裝 mBot 的過程。令 mBot 不再只限於車的型態,而且可以仿生不同的動物昆蟲,玩起來更生動、有趣。
下面相片擷取自官網,我再加入一些組裝的注意事項。
六足擴充包含gif呈現效果 http://www.smart-robot.com.tw/product_d.php?lang=tw&tb=1&id=877&cid=157
Shape Three:Crazy Frog
有點瘋狂的青蛙﹐瘋狂地奔跑著﹐沒有人阻止得了它。以跳躍方式行走,令 mBot 變得更活潑。最簡單,要除輪胎皮,直接裝後肢前肢,運動模式很跳躍。

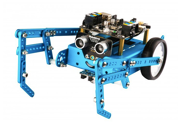
Shape Two:Mantis
它靜靜地爬行﹐威風地揮舞兩支手臂。它能模擬一個獵人﹐在暗處緩緩接近你﹐然後抓住你。螳螂在 mBot 原有的滾輪外再加上兩隻螳螂臂,令行走時更穩定。裝置時要拆卸齒輪,桌面要夠大,這個比六足簡單些,影片中有利用手機來操控
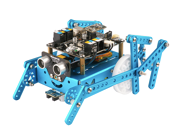
Shape One:Beetle
六足甲蟲移動快速﹐它能迅速轉身來攻擊敵人。六足甲蟲將原本使用滾輪前行的 mBot 轉為使用六足前行,神似地模擬甲蟲移動的模樣。這個要完全卸下輪胎,再卸下前輪與循線感應器,將循線感應器架高,然後裝前腳。按部就班,並參考組裝影片。
連桿機構是四足與六足機器人的基礎,不希望學生只會照著說明書組合,希望學生能先透過影片與智高積木模擬了解連動關係。網路影片整理在:[mbot] 四足與六足仿生獸的基礎~連桿機構相關影片@zfangの科學小玩意
參考教學主題:(一週一節,尚未實作,只是資源整理與想法)
|
|
|
主題 |
說明 |
教學資源 |
|
1 |
青蛙 |
認識螺絲與零件裝卸小青蛙 |
認識零件、安裝說明書 |
影片上 影片下 |
|
2 |
青蛙 |
手機操控小青蛙動作 |
手機操控馬達,或搭配光感超音波感應自走 |
|
|
3 |
螳螂 |
裝卸螳螂練習(純裝卸) |
適當穿插連桿觀念 |
影片下 組裝說明 |
|
4 |
螳螂 |
用手機操控螳螂(免裝卸,純程式) |
不確定移動轉彎時的模式。手機操控馬達 |
|
|
5 |
螳螂 |
用手機操控螳螂(免裝卸,純程式) |
或是超音波感應,循線自走 |
|
|
6 |
甲蟲 |
裝卸甲蟲練習(純裝卸) |
適當穿插連桿觀念 |
影片上 組裝說明 |
|
7 |
甲蟲 |
用手機操控甲蟲(免裝卸,純程式) |
可搭配馬達,手機操控馬達 |
|
|
8 |
甲蟲 |
用手機操控甲蟲(免裝卸,純程式) |
|
|
|
9 |
足球 |
機器人足球,創意組裝(純裝卸) |
可回復車型以輪前進,利用零件做出前方推擋,設計創意車型。並能推動機器人足球。 |
設計上只改前方。改完要回復。也可保護循線,必要時拆下。 |
|
10 |
足球 |
機器人足球,以手機app操控 |
(班級練習) |
需要足球場 |
|
11 |
足球 |
機器人足球,以手機app操控 |
(小組競賽) |
需要足球場 |
創意部分要看大家容忍度,如果只是單純在前方加些螺絲橫桿就簡單。只要做出能推足球(並有足夠保護著循線與超音波)的機器人車,搭配手機操控。如果不做其他擴充,或是講解機構,就醬子。記得跟廠商要三種的組裝說明,順便問有沒有教案,或教學手冊(通常只有附甲蟲的)
可以的話,組裝影片或步驟,自己拍~ 就可以大方使用了。
官方版影片
mBot小課堂第六節課《六足擴充包》上 主要內容為螺絲與零件介紹、基本裝卸,六足甲蟲組裝 https://www.youtube.com/watch?v=qFMIg8wErl0
mBot小課堂第六節課《六足擴充包》下 主要內容為螳螂組裝、瘋狂青蛙組裝 https://www.youtube.com/watch?v=IcO8jxyHwgs
機器人足球 https://www.youtube.com/watch?v=8NsPryzbdVU
