
自動目錄
mbot內建幾個感測器,超音波感應器、光線感應器、巡線(循線?)感應器。紅外線發射與接收。
這裡介紹巡線感應器。基本介紹與循黑線,不含繞障與接力。
本篇只利用基礎的非循黑線與循白線功能。搭配超音波可以繞障,若是搭配超音波與紅外線消息,可以玩接力。。
循線感應器介紹
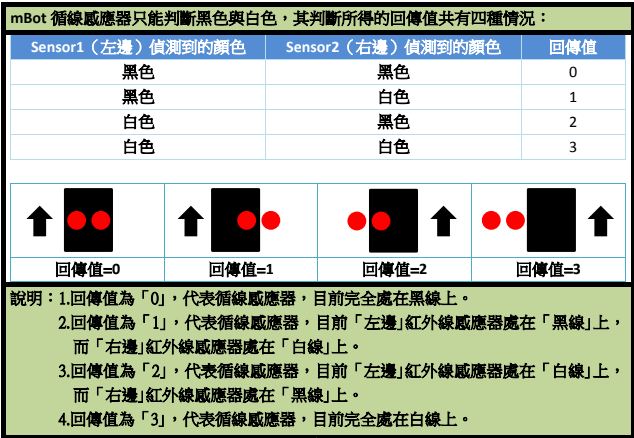
巡線感應器主要是利用紅外線的發射與接收。在mbot裡是套裝元件,包含二組紅外線發射接收,以作為偵測不同顏色(黑色或白色,黑色吸收光線),並能循著黑線或白線而前進。
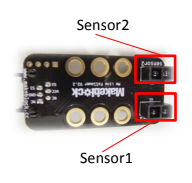
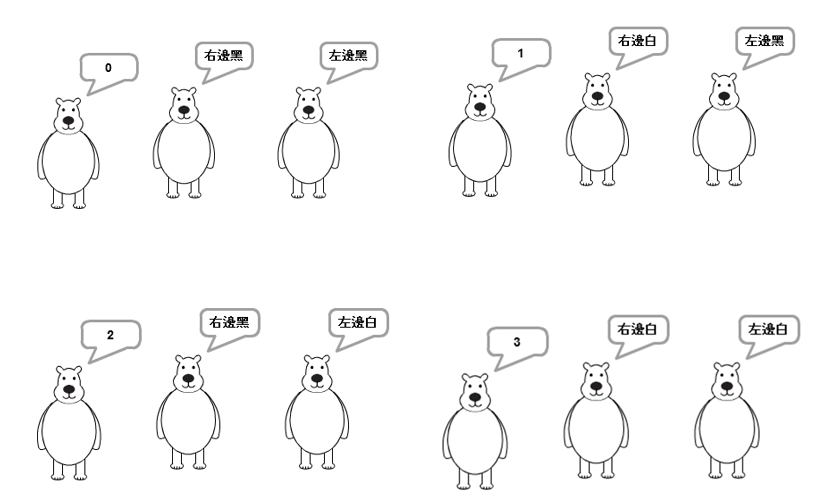
依前進方向左右,各一個紅外線感應器,Sensor1(左)、Sensor2(右)。

在舞台模式下自我檢查,讓學生知道0123的意思。(若是無法偵測,重新回復原廠設定後就可以)

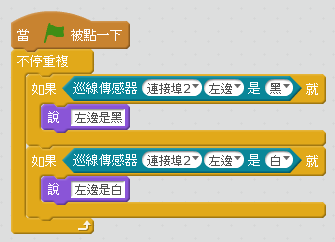
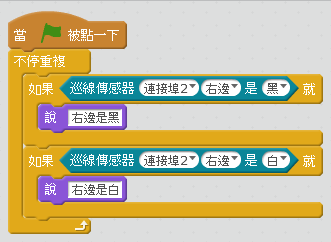
有二個積木可以使用,也可以單獨判斷左邊與右邊
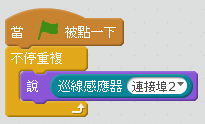
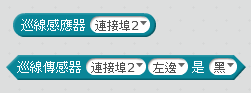 或連結使用
或連結使用 
常搭配變數功能

常搭配的積木
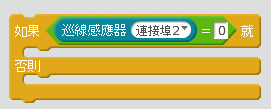 分岔模組
分岔模組
 等待模組與迴圈模組
等待模組與迴圈模組
mbot巡線感應只能判斷白色與黑色
簡單練習,搭配舞台設計,讓學生知道左右黑白與0123的關係:
參考程式
循黑線(或白線)~單純版
如果是走在黑線裡,簡單的這麼寫。
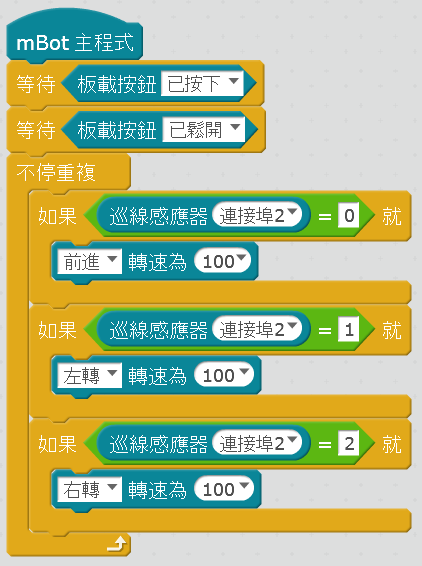
但是~會發現,一直會抖。為什麼呢?因為車子隨時在進行修正!
特別是線特別細,或是特別彎的時候。
這是~就要讓學生思考,怎麼改善!
這個程式可以進行走直線循線,走黑線,遇到盡頭就迴轉。
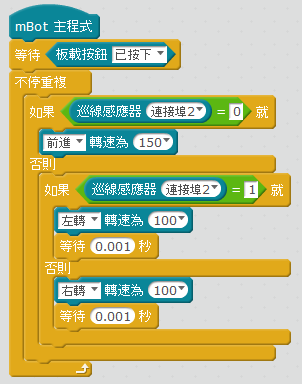
我的學生試著用微調一點點來解決顫抖的問題(0.001秒,能有效果嗎?)
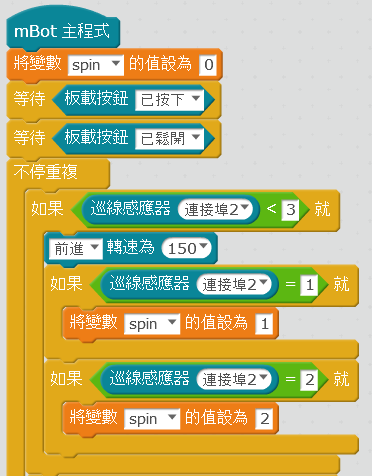
別忘了~我們還有一個3還沒有用到。
還有一種循黑線,其實是抓走在黑白之間,透過變數紀錄原先是偏左或偏右,等真正出線(偏離軌道)了,車子才做轉向修正。
為了解決顫抖, 學生黃昱翔的設計,如下:
 與
與 
循線的其他運用~
與黑線垂直的運動,也可以量測黑線的寬度。不碰黑線(迷宮或密室)
基本練習(1):遇到黑線就停車
走判斷就不用算秒數:

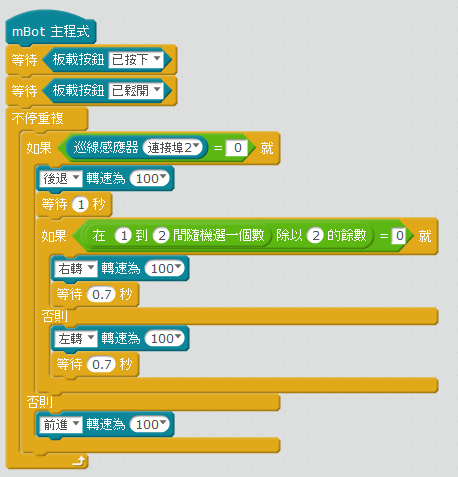
可以延伸變化,遇到黑線就後退與隨機轉彎,讓車在限制範圍內移動。
甚至遇到黑就停下也可以變成桌子上的版本,讓車子靠近懸崖就停車。桌邊也跟黑色一樣,回傳值是0。如果要玩這種走在懸崖的遊戲,車速不要太快~否則會掉下去(用軌道板簡單架高即可)。
幾個遇到黑線就停車的參考程式(搭配板載按鈕已鬆開,一放就執行)
 或
或 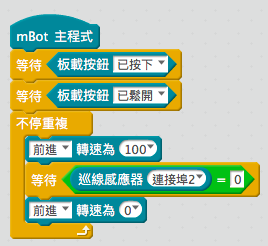 或
或 
遇黑線隨機轉彎
基本練習(2):經過三條黑線就停車(搭配變數)
遇到黑線就數數,計數通過幾條黑線

黑線的寬度要算,這裡用轉速100,0.2秒去估。
或是數到第三條就停止

學生惟勛寫的

之後變化:
十字路口判斷篇、虛線的循線,由循黑線變成循白線。
繞障:遇到障礙物就繞過,再走回原來路線
接力:循線,遇到前方車子停下,發出消息讓對方循線。
